Boards
http://cafe.naver.com/perfectdrive/1427
CJ 슈퍼 레이스 1전 전에 위의 로깅 데이타를 볼수 있었는데
연습주행에서 1분 3초대가 나오더군요...
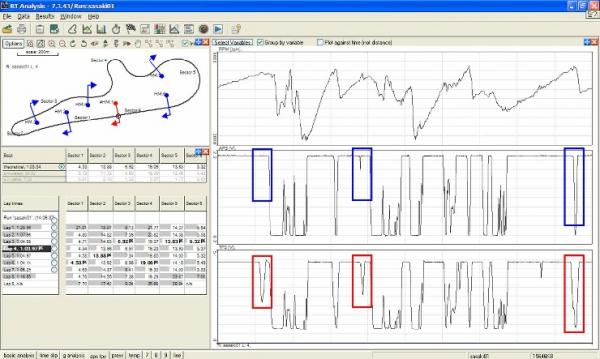
오른쪽 맨위는 RPM 가운데 엑셀포지션 센서값 아래는 스러틀 밸브 포지션 센서값 입니다
왼쪽위는 태백서킷을 구간별로 나눈것이고
가운데는 구간별 최고 타임으로 만든 랩타임
아래는 랩별로 구간별 타임을 보기위한 테이블 입니다.
위그래프를 올려주신 분은 엑셀 포지션 센서값의 변동이 없는데...
스러틀 밸브 센서값이 변한것에 주목하시더군요...
혹시 이유를 아시는 분이 있으신지요...
사진은 캡쳐한거라...
큰 사진은 링크에서 클릭하면 큰 사진으로 볼수 있습니다.




악셀 포지션과 쓰로틀 포지션이 일치 하지 않는다는 것(AP=>TP)은 엔진의 아웃풋인 토크와 회전수를 제한했다는 것입니다. 제한하는(다운시키는) 이유는 전자제어 초기에는 엔진과 트랜스미션의 보호가 주된 목적이었고, 근래에는 VDC 등의 운전자의 안전과 환경에 관계된 것들이 계속 늘어가고 있습니다.
차량의 성능이 높아짐에 따라 각종 물리량이 한계선을 넘나드는 상황이 많아지게 되어 두더지 잡듯이 더 이상 못 올라오도록 막아줘야 하는데 쉽게 느낄 수 있는 것이 rpm 레드존에서 회전수에 상한을 걸어둔 것입니다. 위 그림에서 세 곳의 사각 박스를 비롯해서 다른 곳의 7000rpm 부근에서도 AP와 TP가 일치하지 않는 것이 보입니다. 또한 rpm이 급격히 감소되는 브레이킹 구간을 지나 악셀을 밟기 시작할 때에도 AP보다 TP가 적게 나오네요. 트랙션 제어가 작동하면서 토크다운을 하는 가 봅니다.
토크(회전수) 제한을 하는 경우는 수 십 가지 정도 있습니다. 엔진보다는 미션에서 요구하는 것이 더 많습니다. 유닛 단위로 보면 미션이 엔진과 휠 양쪽의 힘을 받고 있고, 엔진은 능력껏 가능한 대로 많이 내면 되지만 미션은 이 이상은 못 받아 준다며 그만하라고 요구를 합니다. 그래서 엔진은 (+), 미션은 (-)엔지니어링 이라고들 합니다.
토크나 회전수 제한은 엔진 스톨 시(오토차량 드래그 할 때, 스톨 상태 or 높은 rpm+D셀렉트 중 어떤 스타트 방법이 빠른지는 차마다 다릅니다)나 정차 없이 전후진을 할 때, 레이싱 스타트(드래그 스타트), 각종 온도가 높거나 낮을 때, 휠 스핀 recovery시, 마찰계수 jump시, 각 기어 변속, 락업시, 공회전 레이싱(일명 후까시)시, 기타 각종 fail시 등등의 전자제어를 비롯해 수동미션 클러치의 스트로크 댐퍼와 같은 기계식 토크 제한기도 있네요. 상당부분의 상한제한은 마니아 포함 대부분의 운전자는 눈치 채지 못합니다. 원래 그 상황에서 그렇게 만들어졌고 항상 재현되기 때문입니다. 하한 제어도 있습니다. 배기가스 문제로 토크(회전수)가 늦게 떨어지도록 기울기를 제한하거나 반응을 느리게 지연 시키고, 에어컨을 켰을 때 회전수가 올라가는 것도 필요 토크 이상 나오도록 하한(up)을 시킵니다.
토크는 회전수보다 선행합니다. 회전속도를 올리거나 내리려면 회전관성에 힘의 가감이 있어야 관성을 이기고 속도의 변화가 생깁니다. rpm제한보다 토크다운이 제어 상으로 더 빠른 응답성을 요구하며 0.01초가 아쉬운 상황이 많습니다.
엔진은 공기+연료에 점화를 시키면 돌아가고 한 가지라도 빠지면 안 돌아가죠. 가장 응답성이 빠른 것은 전기이므로 점화를 off시키거나 시기를 조정하기도 하고, 그 다음이 연료cut이고, 쓰로틀 제어는 응답까지의 시간이 많이 걸리므로 어느 정도 목표로 하는 토크(회전수)가 나오면 이때부터 사용합니다. 하드웨어의 포텐셜에 따라 만들고 싶은 모양이나 환경규제 등에 따라 점화, 연료, 쓰로틀을 순차적으로 혹은 적절히 섞어서 혹은 어느 한 가지 만을 사용해서 구현합니다. 여기까지가 위 그래프에 대한 애기입니다.
가깝고도 먼 나라의 이야기입니다만, 각 사별 하드웨어의 포텐셜과 제어성능 이야기가 있습니다. 전통적으로 T사는 하드웨어에 자신있고, M사는 제어에 많은 노력을 하며, N사는 그 중간적이기도 하면서 때로는 양립시키는 천재 아니면 바보 같은 특징이 있(었)다고 합니다. 하드웨어의 포텐셜이 뛰어나면 제어가 복잡하게 들어가지 않아도 목표성능을 쉽게 낼 수 있으며 한 번 만들어 놓으면 죽을 때까지 일정하게 유지된다는 장점이 있습니다.
제어가 강하다는 것은 화려한 기능을 구현하고 자랑하기도 쉽지만, 부실한 하드웨어를 보완하여 목표를 달성시킨다는 필요악 적인 요소가 있습니다. 일례로 공차나 열화에 의한 성능(내구성)저하를 막기 위한 여러 가지 학습제어가 있는데, 하드웨어의 약점을 잘 덮어줘야 제 성능이 나오는데 범위나 magnitude가 잘못됐다든지 해서 잘못 배우거나 배운 걸 엉뚱한데 써먹거나 뭘 먹어서 뭘 쌀지도 모르는 식의 결과가 나오는 경우도 있습니다. 이런 경우 차량마다의 성능이 전체적으로 하향평준화 되거나 좋고 나쁨의 편차가 심해집니다. 경험이 쌓이고 예측이 가능해지면 피드백하여 제어기술을 축적하고 새로운 제어를 구상해 나간다는 패턴입니다.
최근에는 서로 먹고 먹히고, 여럿이 나눠 먹거나 돌려 먹는 관계 속에서 제어기술이 누구에게나 중요하게 부각되어 하드-소프트웨어의 장단점이 점점 무뎌져 가는 것 같습니다.
어쩌다 보니 길어졌네요. 오랜만에 모국어로 수다 떤 기분이네요. 출근해야 하는데 갑자기 졸음이 쏟아져 이만 줄입니다.^^


뭐 그 정도가 생각나네요. 두번째 사각형친 부분에서는 오히려 RPM은 튀는데 TPS는 떨어졌네요.